The robotic system developed by Li Shuguang et al. shows that the random motion of a single component can produce deterministic behavior, which is similar to the life system and has potential applications in the environment and medicine. In biological systems, large-scale behavior can be achieved through collective coupling and coordination of random motion of small-scale components. For example, living cells gather and migrate collectively during wound healing and cancer cell proliferation. Inspired by these biological mechanisms, MIT and Columbia University's Li Shuguang and others published a paper on robot clusters in a paper published in Nature recently: by loosening many disk-like components that can move randomly. Coupled together, deterministic motion can be produced. The research results show that randomness is expected to be a breakthrough in the development of large-scale robot clusters with robust deterministic behavior. In systems developed by Li Shuguang et al., these disc-shaped components cannot move independently of each other and cannot be individually manipulated. In addition, each component can only oscillate within its radius - stretching and contracting, thereby achieving motion. The author calls this extremely simplified setup a "particle robot." In the absence of an external stimulus, the system can only do random motion. However, by programming these components to adjust their response to a varying signal in the environment, they move collectively toward the signal direction. Li Shuguang and others tested a system of 24 particle robots and simulated a system of 100,000 particle robots. Each component oscillates at a diameter of 15.5-23.5 cm. The authors confirm that the system can achieve robust motion and object handling, as well as moving toward light and avoiding obstacles (Figure 1). In particular, the authors found that even though 20% of the components failed, the motion continued, indicating that the particle robot has robustness against individual component failures. Previous research has focused on components that can move independently and independently, and these components are based on relatively complex deterministic designs. Most of the robot cluster systems previously reported have limited flexibility within the allowable configuration range, while the specific components of those amorphous systems suffer from insufficient scalability. In addition, many of these systems require a certain degree of centralized control, which further limits their capabilities and scalability. In this respect, Li Shuguang and others' particle robot method provides a new choice. In addition to being inspired by biological systems, this technology draws on the phenomenon of statistical physics, in which the overall statistical behavior of a large number of random components can be modeled and manipulated without the need to track individual components. Therefore, this method has significant advantages over other methods, especially its ability to expand the number of components and reduce the size of the unit. Robotic cluster systems need to have this expansion capability to be used in energy extraction, engineering and medical fields. Li et al. Of course, the author's system also has some drawbacks . First, if there is no environmental signal gradient at the location of the entire cluster system, the system will not be able to move toward the source. Second, these components need to be artificially configured at the outset because they cannot interact with each other through independent movements. Third, the number of components displayed in the test is limited, the speed is relatively slow, and the volume is large; in the near future, the system should be developed in a larger number, faster, and smaller size (to narrow down to the micron level). ). Fourth, this technique is not suitable for directional self-assembly and self-organization into complex, preset geometries due to the randomness of the entire cluster and the uncertainty of component placement and coupling. With the continuous development of small-scale robots, it is now expected to design and manufacture a large number of random or deterministic components that exhibit collective and cluster behavior similar to particle robot systems. Over the past few years, by designing magnetic interactions between individual units, researchers have created mobile microscale robot clusters with clear collective behavior. The main manipulation strategy for such robot clusters generally relies on the unit's response to remotely manipulating the global field, such as a magnetic field. While this makes it difficult for researchers to process each unit individually, it can globally control the collective coupling interaction between units to achieve programmable local interaction, self-assembly, and collective behavior. This approach has been used to achieve collective two-dimensional assembly, decomposition and manipulation of synthetic micro-robot clusters at the air-water interface. The particle robot system of Li Shuguang et al., and most other robot cluster systems are mainly two-dimensional motion. If you can extend them to three dimensions, increase the complexity of the component's motion behavior, and allow them to accumulate on surfaces or liquids, it is expected to increase their application potential. However, expanding into 3D means that there are many hardware design challenges, including how to achieve robust motion, aggregate stability, reversible and programmable component attachment, miniaturization, and manipulation. In the near future, it is important to verify that such robotic cluster systems have significant engineering and medical value that cannot be achieved by other methods. For example, a bacteria-driven random micro-swimming robot may be able to use the particle robot approach to deliver drugs to a target area that is otherwise difficult to reach in the human body. Such robotic clusters may be able to achieve directional motion based on chemical gradients, oxygen gradients, or pH changes in the cancerous tissue environment. Many studies have shown that bacterial-driven micro-robot clusters have potential applications for targeted drug delivery, medical diagnostics, and environmental sensing. Source: Nature Natural Science Research 1-Piece Ostomy pouch MDK-BO-01 100ML
A one-piece colostomy bags, drainable pouching system designed to be opened at the bottom when emptying. These colostomy bag machine are most suitable for colostomies or ileostomies. Ostomy bag colostomy barrier is a standard wear skin barrier that is gentle to the skin and allows for frequent pouch removal. To close the pouch, use the curved, beige clamp. Soft, beige disposable colostomy bag pouch panels on body side help provide comfort.
The features are soft and flex,standard wear, skin barrier, flat. The Chassis made in 100% hydrocolloid No tape border. Cut-to-fit skin barrier. Ultra-clear odor-barrier pouch film. Curved, beige pouch clamp. With comfortable ware pouch panel body side only. Not made with natural rubber latex.
Ostomy urostomy colostomy bag care products consist of sodium carboxymethylcellulose, adhesives made from medical hot melt adhesives, and separator paper or separators. Nursing equipment for ileum, colon, rectum or urethral stoma,The coloplast colostomy bag comes into contact with intact skin and intestinal lumen,Non-sterile supply. Colostomy bag reusable for stoma washing, care and collection of excreta and skin care around the stoma.
Use disposable colostomy bag, make sure the skin around the stoma is clean and dry before use. Remove the bags for colostomi from the package and separator or paper. Reshape the coloplast colostomy bag into the desired shape and size to fit the skin around the stoma. Apply the colostomy convatec bag to the skin around the stoma,adjust the shape of the paste again,Gently press so that it is firmly flat on the skin. Attach the stoma colostomy bag undercarriage to the stoma. The colostomy bag care can be peeled off the skin, don`t reuse. These one-piece-colostomy bag or two-piece-colostomy-bag are non-sterile product and is valid for three years under the condition of meeting the storage conditions.
1-Piece Ostomy Pouch,One Piece Ostomy Bags,One Piece Ostomy Pouch,1 Piece Ostomy Bag Henan Maidingkang Medical Technology Co.,Ltd , https://www.mdkmedical.com
Cover image: Felice Frankel 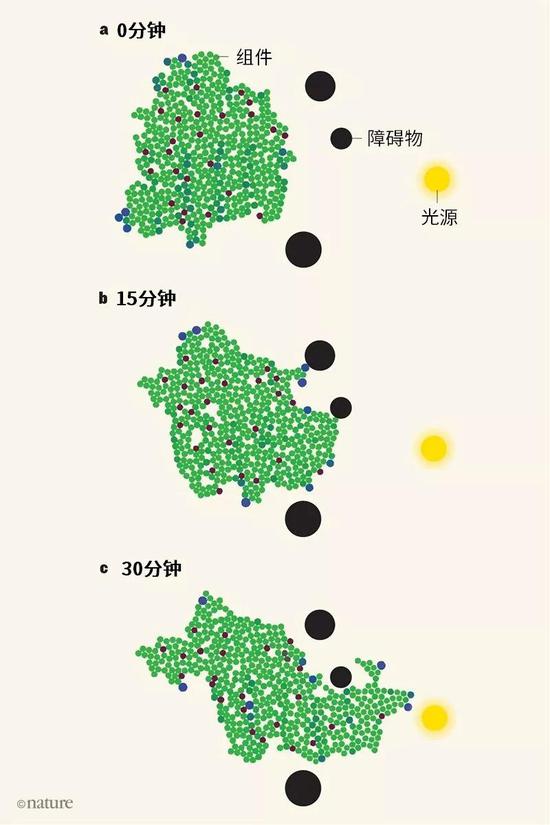
Figure 1 | Innovative cluster robot system. Ac, Li Shuguang et al. reported a robotic system consisting of a number of loosely coupled, randomly moving centimeter-level components. Each component can only oscillate within its radius, doing stretching and contracting movements. The color of the component represents the diameter of the ring when it oscillates - green means the smallest diameter and blue means the largest diameter. Maroon is a failed component and is specifically designed to test the robustness of the system. The authors show that the system can gradually make deterministic motion towards environmental signal sources (such as light sources), while having obstacle avoidance capabilities. (Adapted from Li, S. et al. Nature 567 , 361–365 (2019) Fig. 1f.) 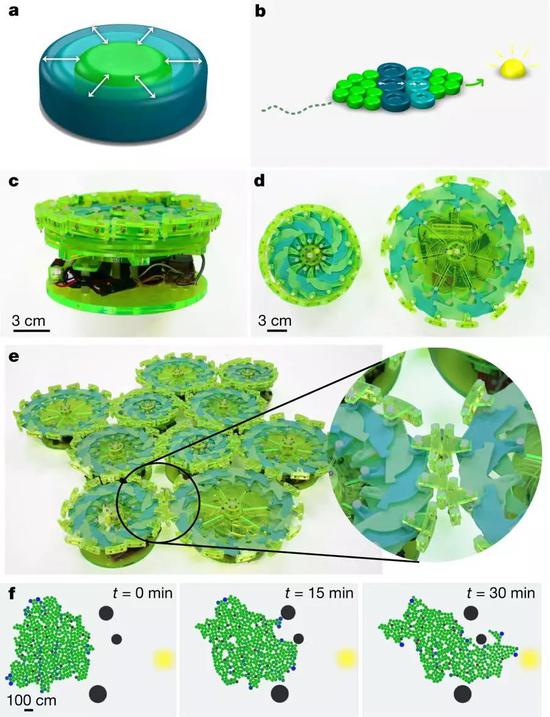
A particle robot consists of a number of loosely coupled individual "particles".
Li Shuguang team develops particle robots that can migrate like living cells
:2019-03-29